Gallery
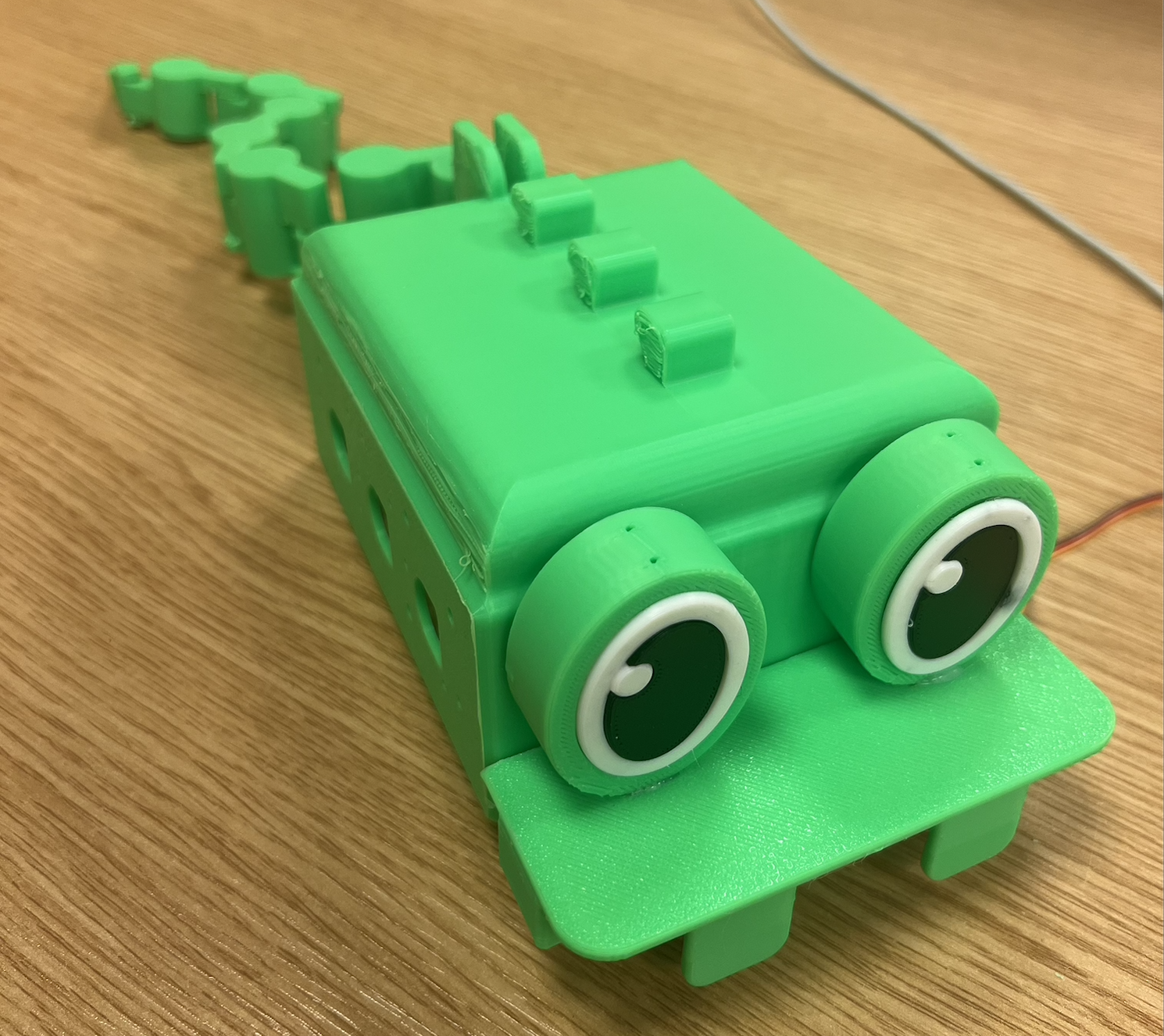
Process shots and final rover. Click any photo to view it larger.
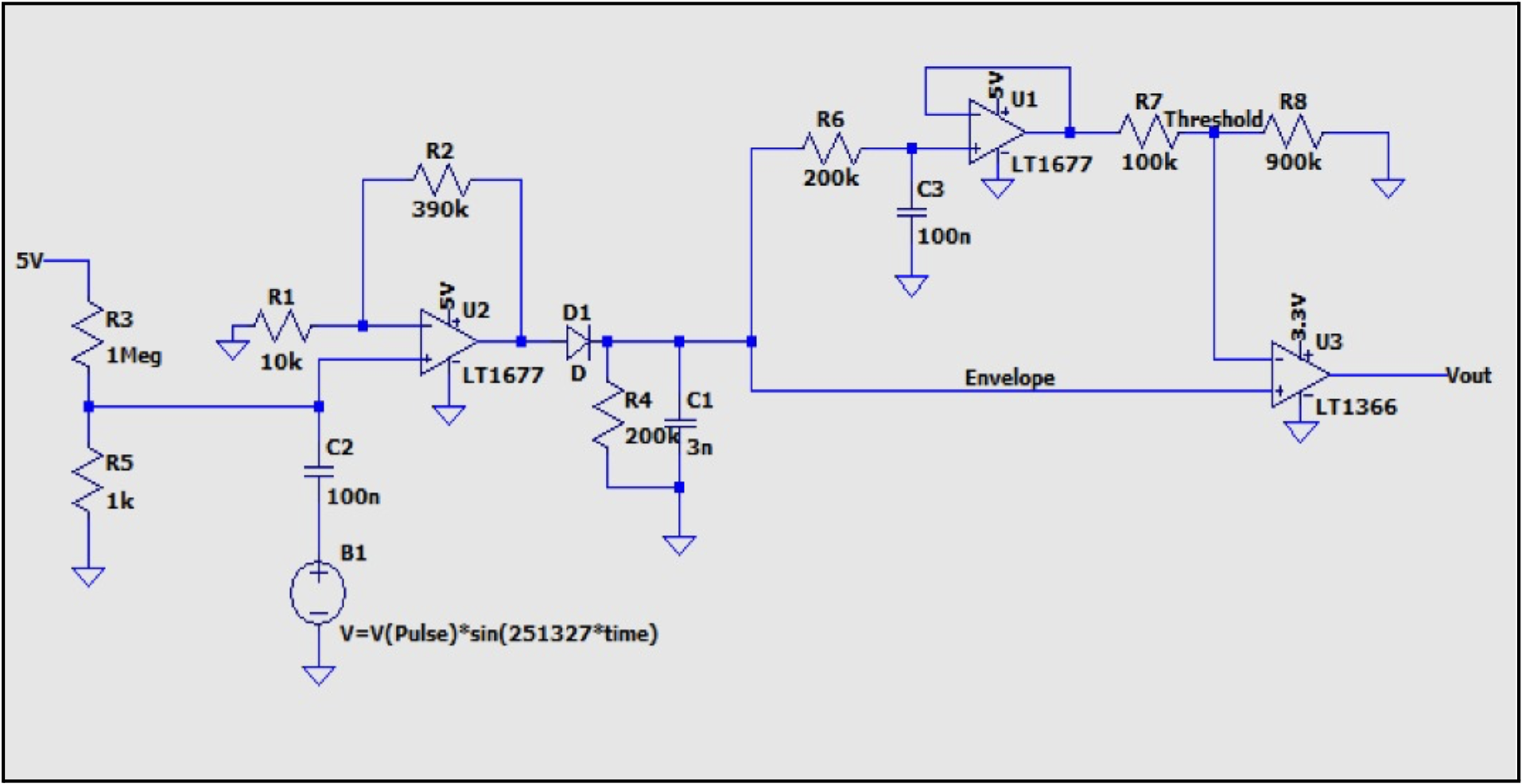
LTSpice Ultrasonic sensor schematic.
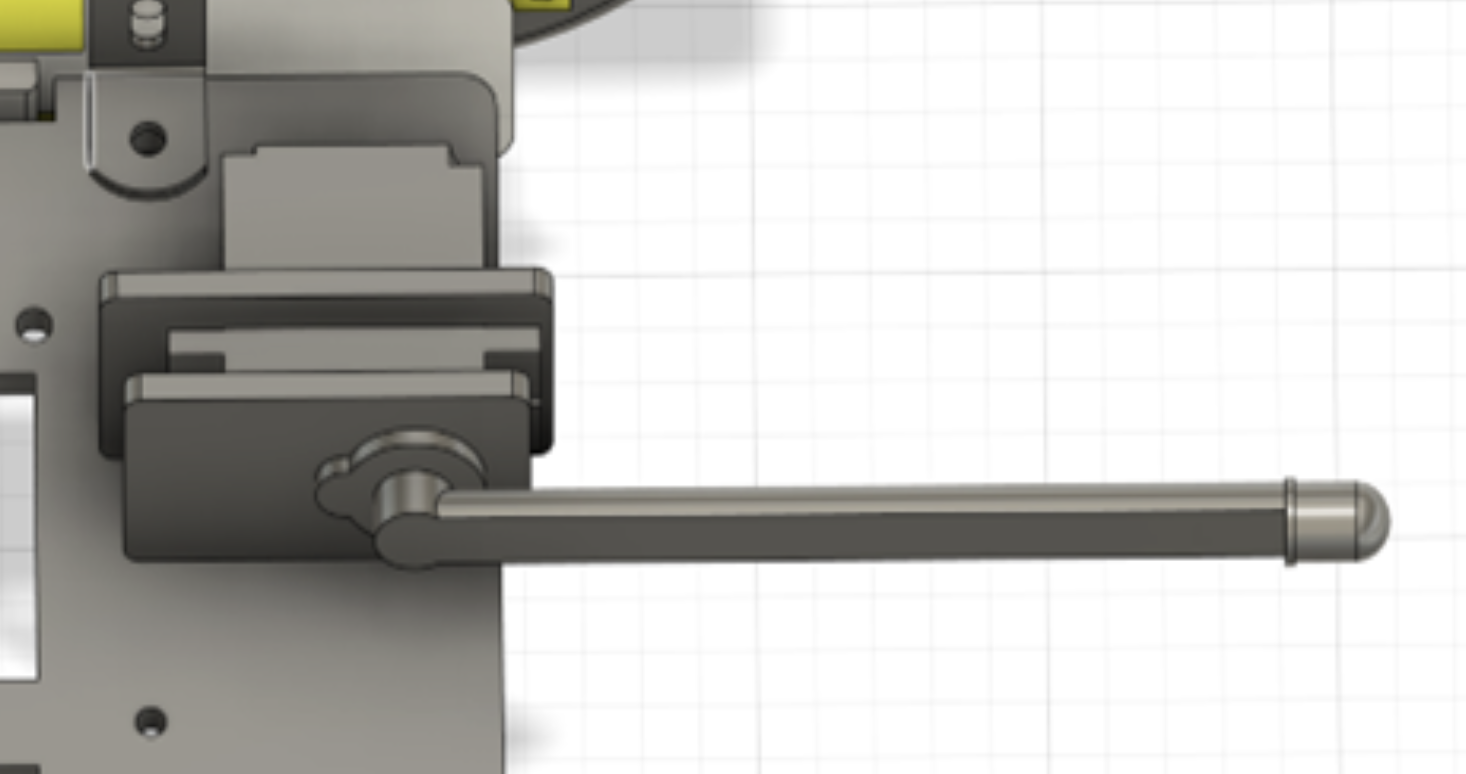
Rover's "tongue". Up down motion design for flexible reach using servo SG90 x2.
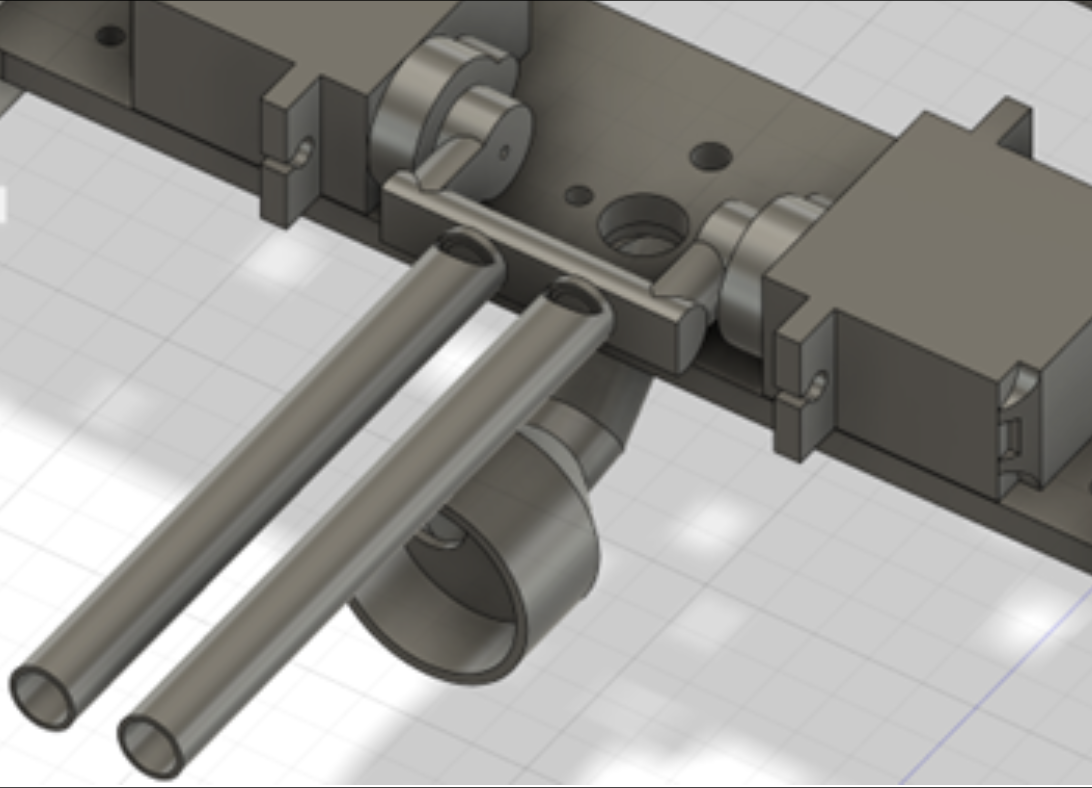
Ultrasocnic, IR and magnetic sensor chassi mounts.
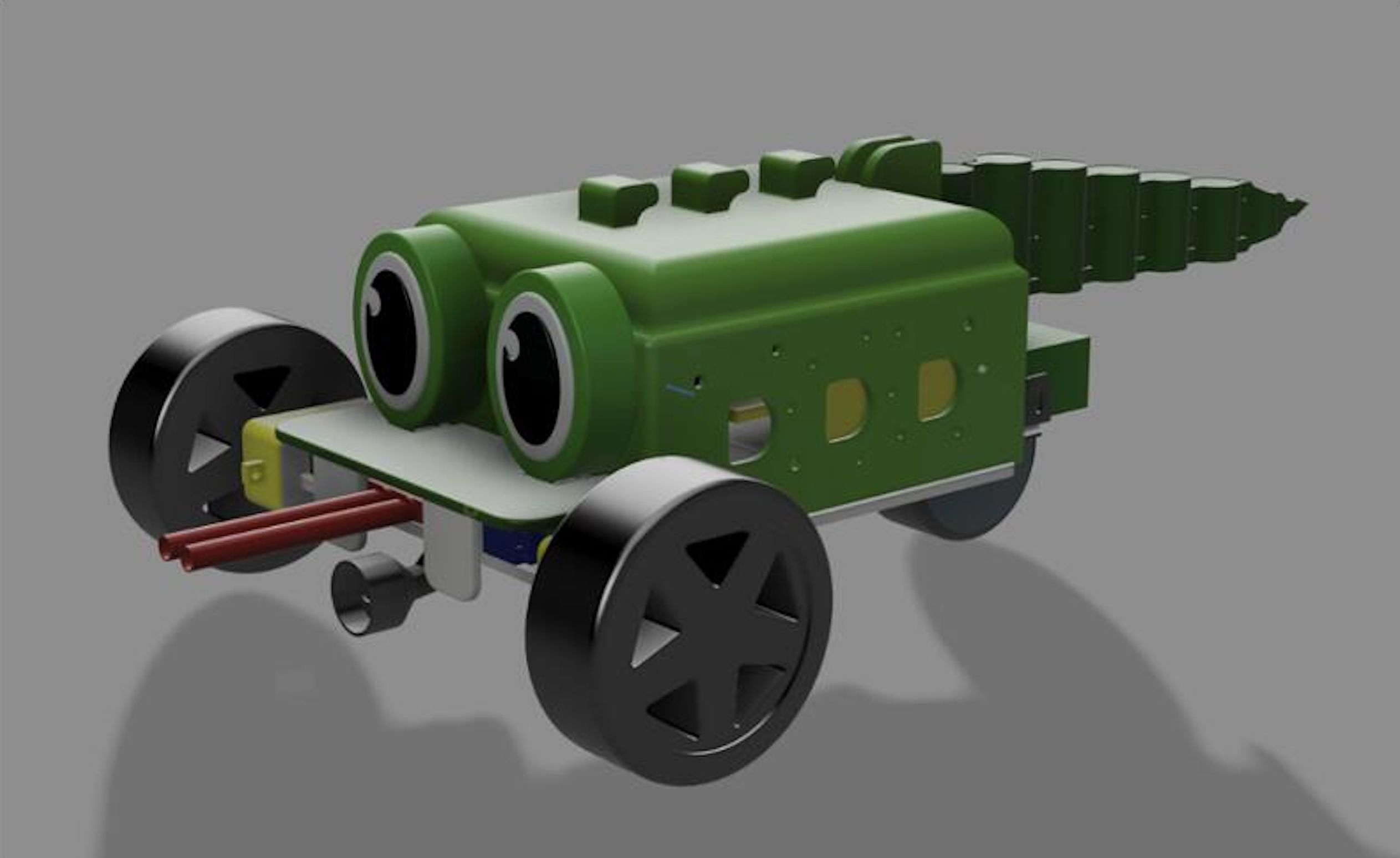
Rover full design in Fusion360
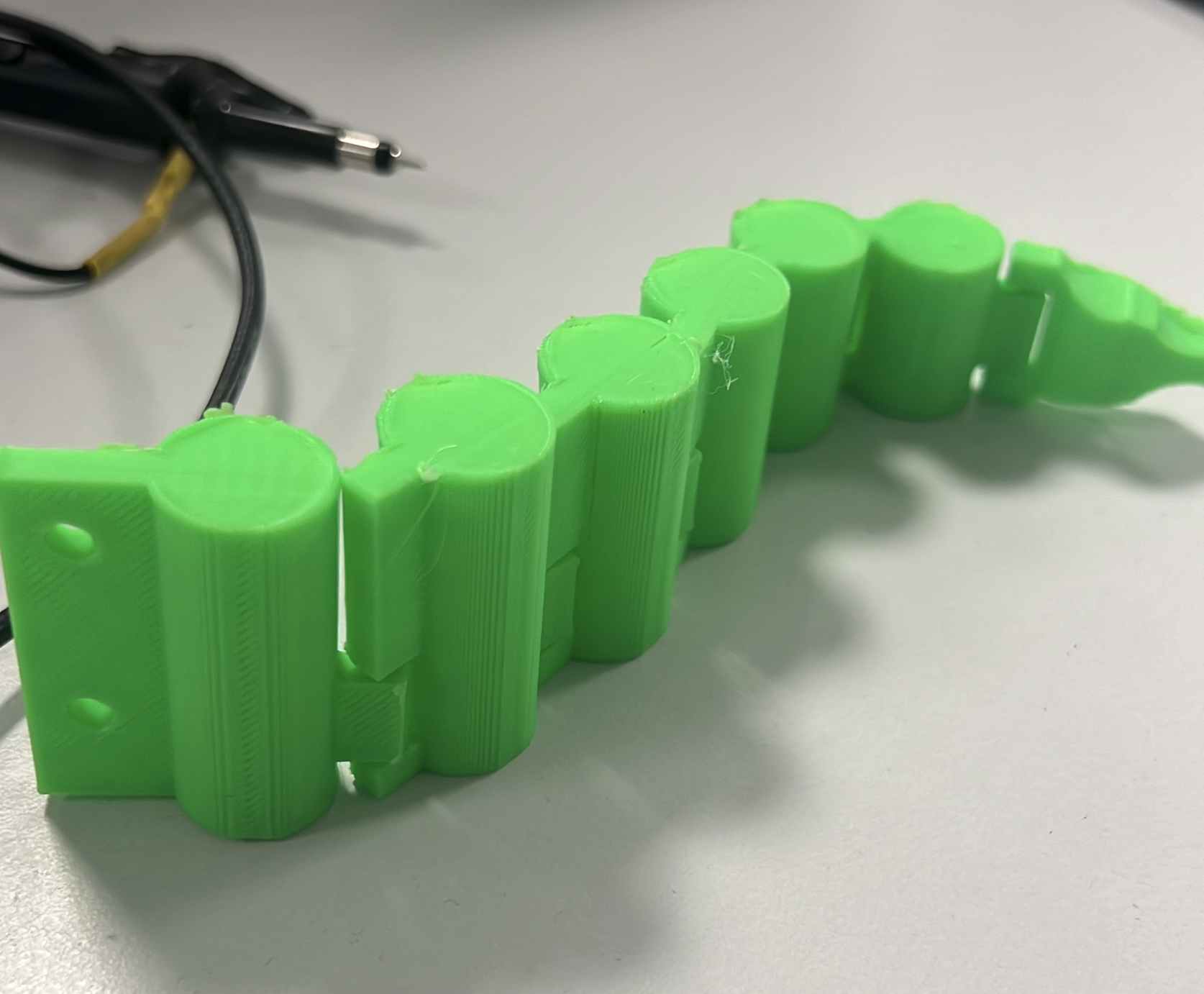
Rover's 3D-printed "tail"