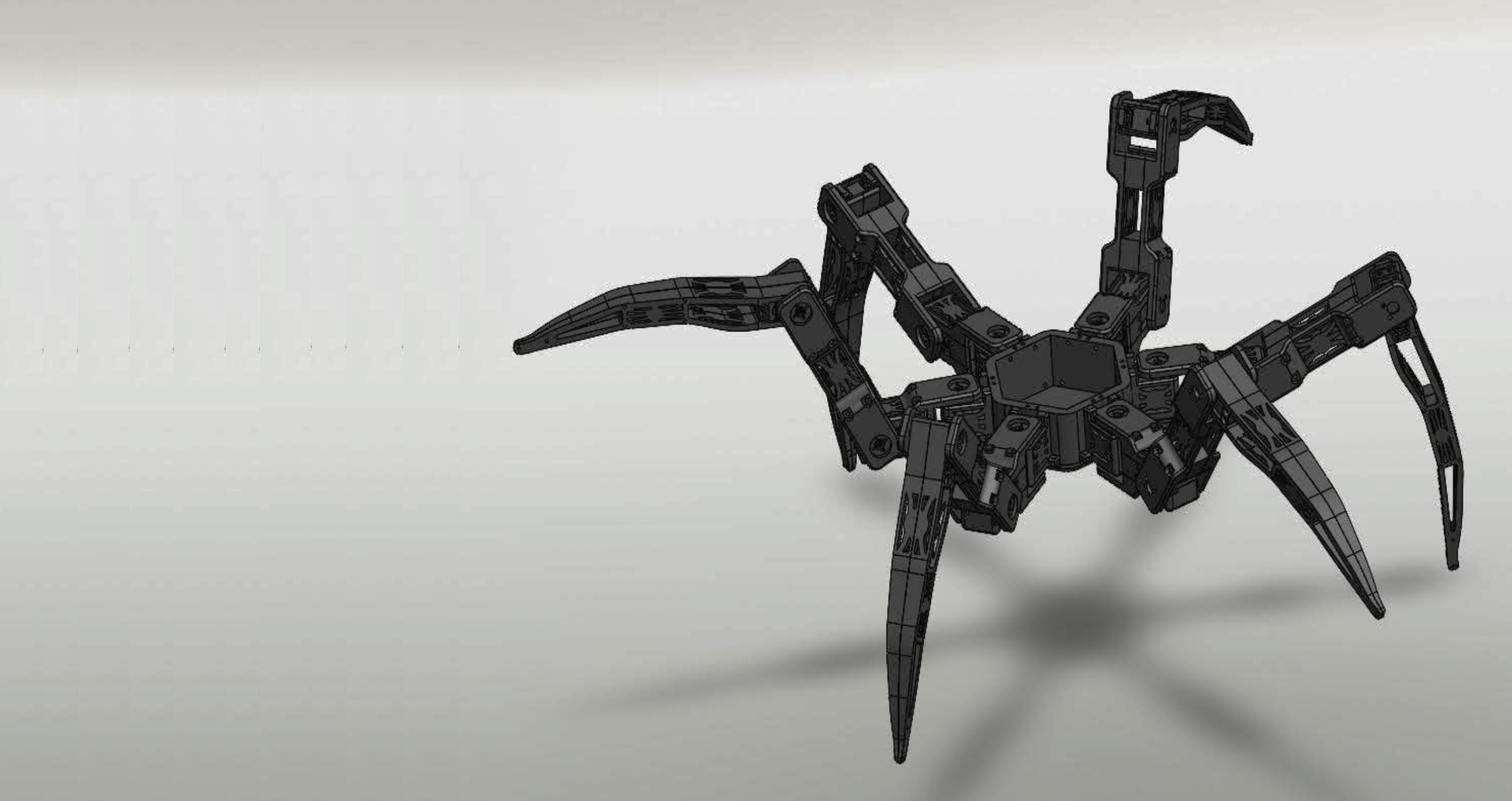
Fully designed and printed a 6 legged hexapod robot (Programming in progress)
Details
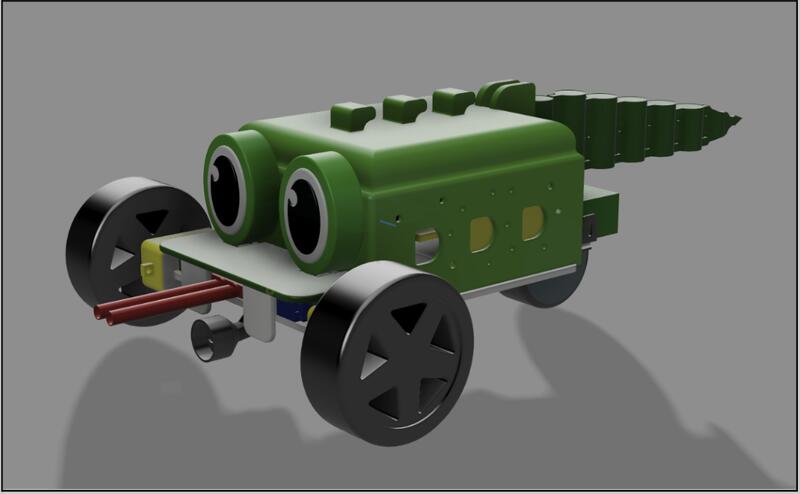
Computer vision and SLAM
Exploration rover. Detecting and decoding 4 signal types.
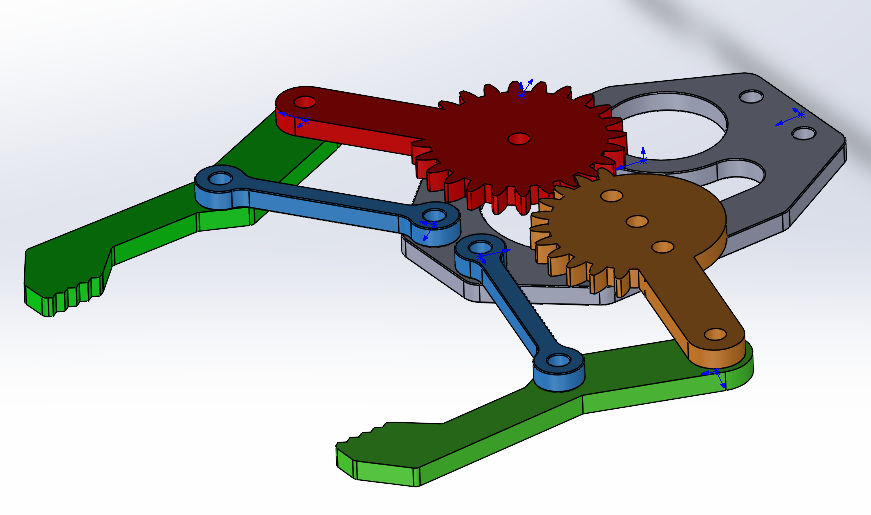
Developed a gripper to study CAD and 3D printing